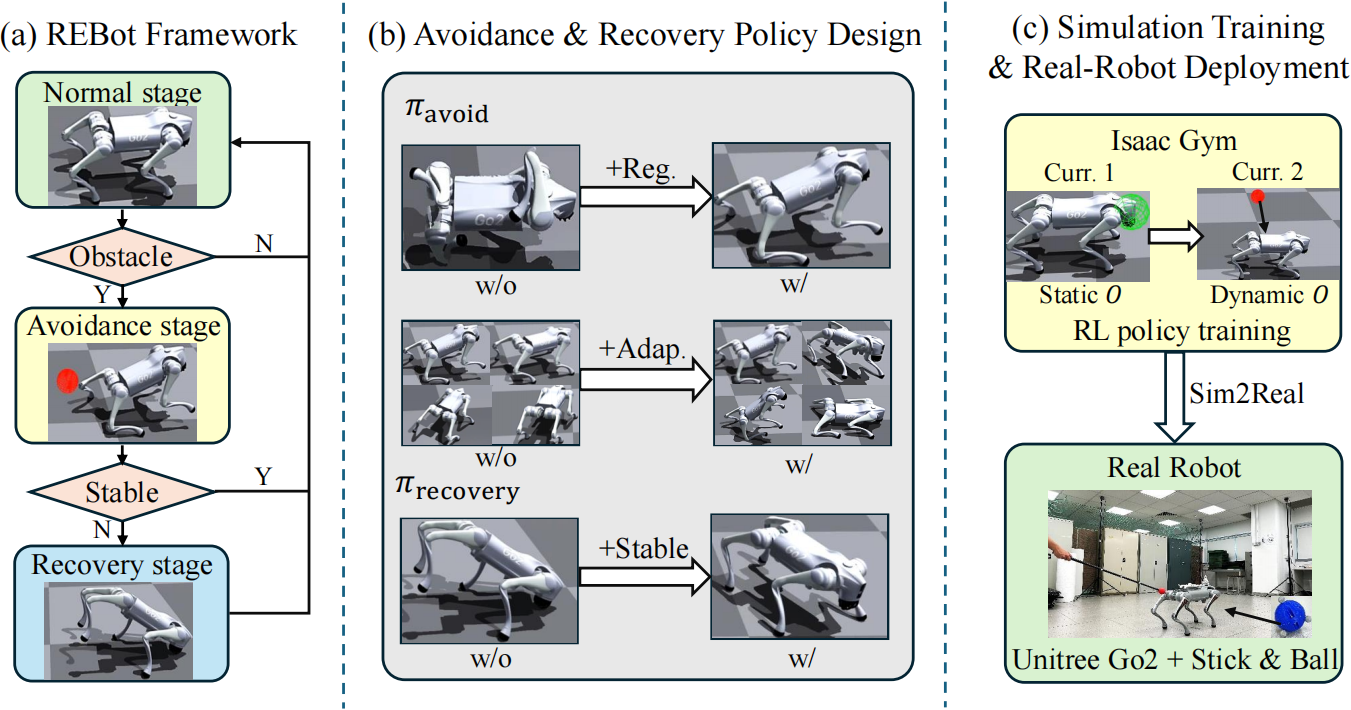
REBot: Reflexive Evasion Robot for Instantaneous Dynamic Obstacle Avoidance
Zihao Xu1*, Ce Hao1*, Chunzheng Wang2, Kuankuan Sima2, Fan Shi2, Jin Song Dong1
IEEE Robotics and Automation Letters (RA-L)
CoRL 2025 SAFE-ROL Spotlight
IROS 2025 LEAPRIDE Spotlight